Overview
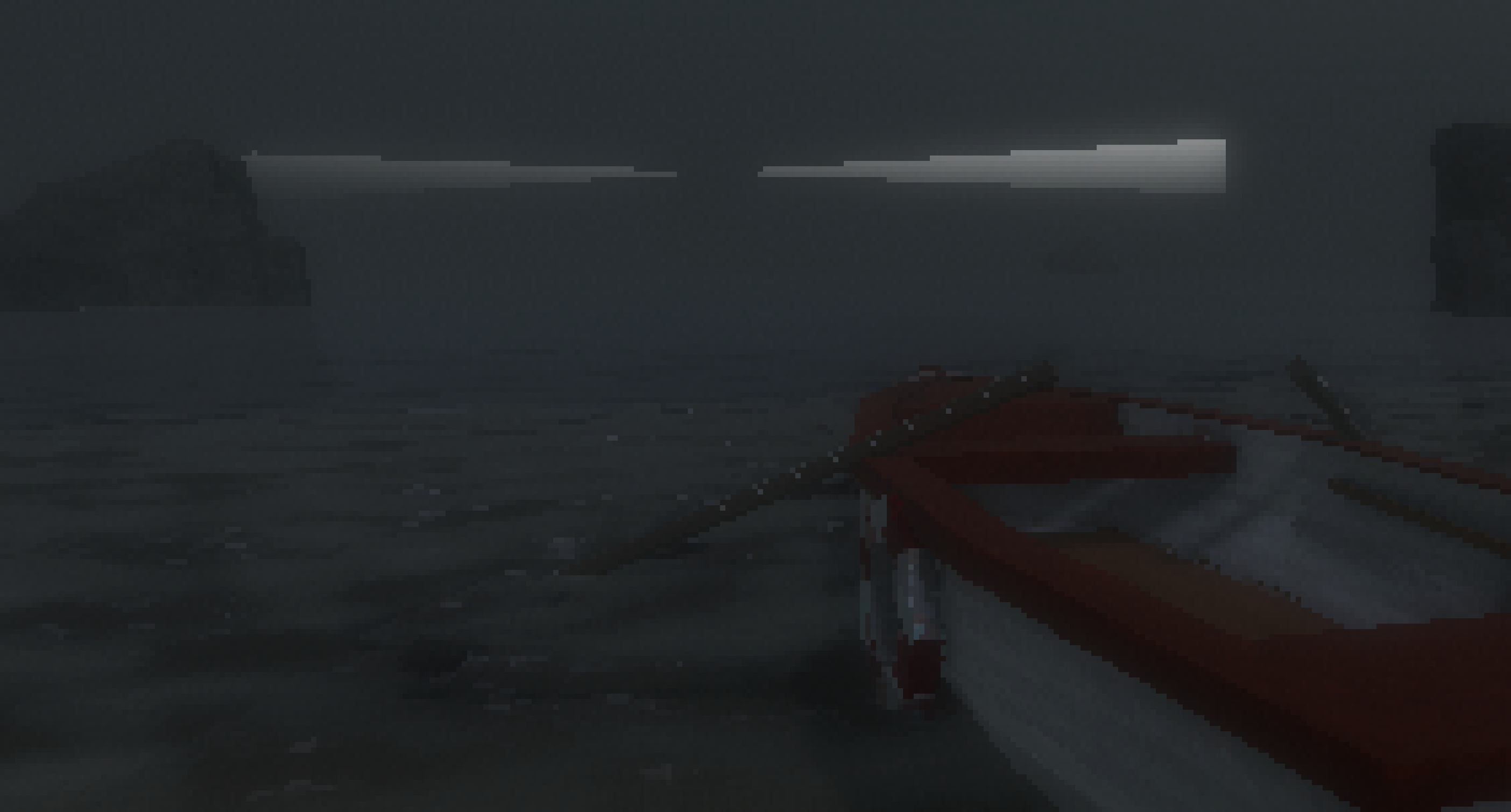
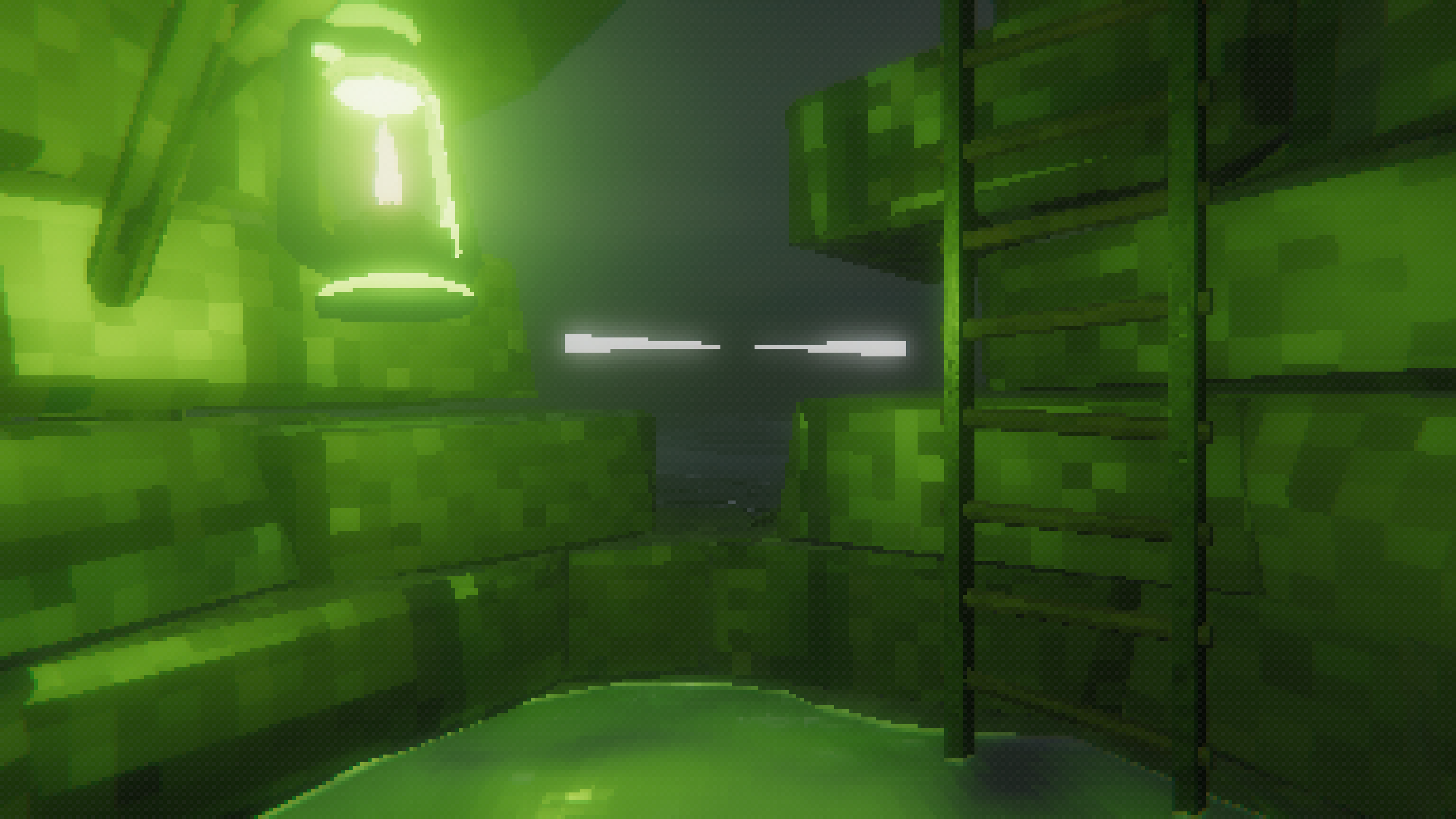
I decided to try the High Definition Render Pipeline in Unity, which gave me access to volumetric lighting and fog. These effects look great, even when the image is downsampled and dithered, as I was going for a mix of PS1 graphics with modern lighting.
Ocean
This is the Gerstner wave shader...
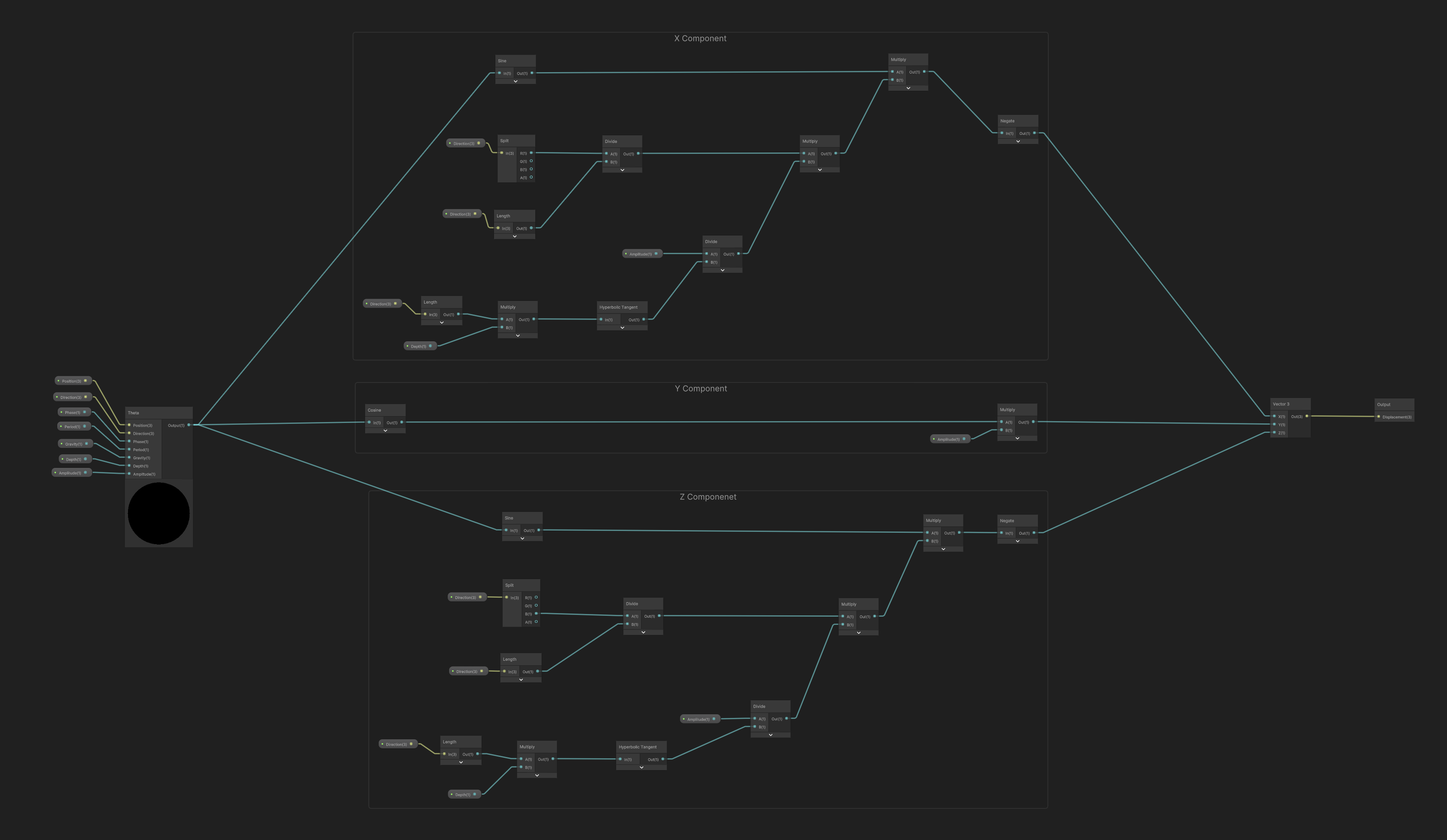
Vector3 GerstnerDisplacement(Vector3 pos, Vector3 direction, float amplitude, float phase, float timescale, float offset, float gravity, float depth)
{
float period = offset * timescale;
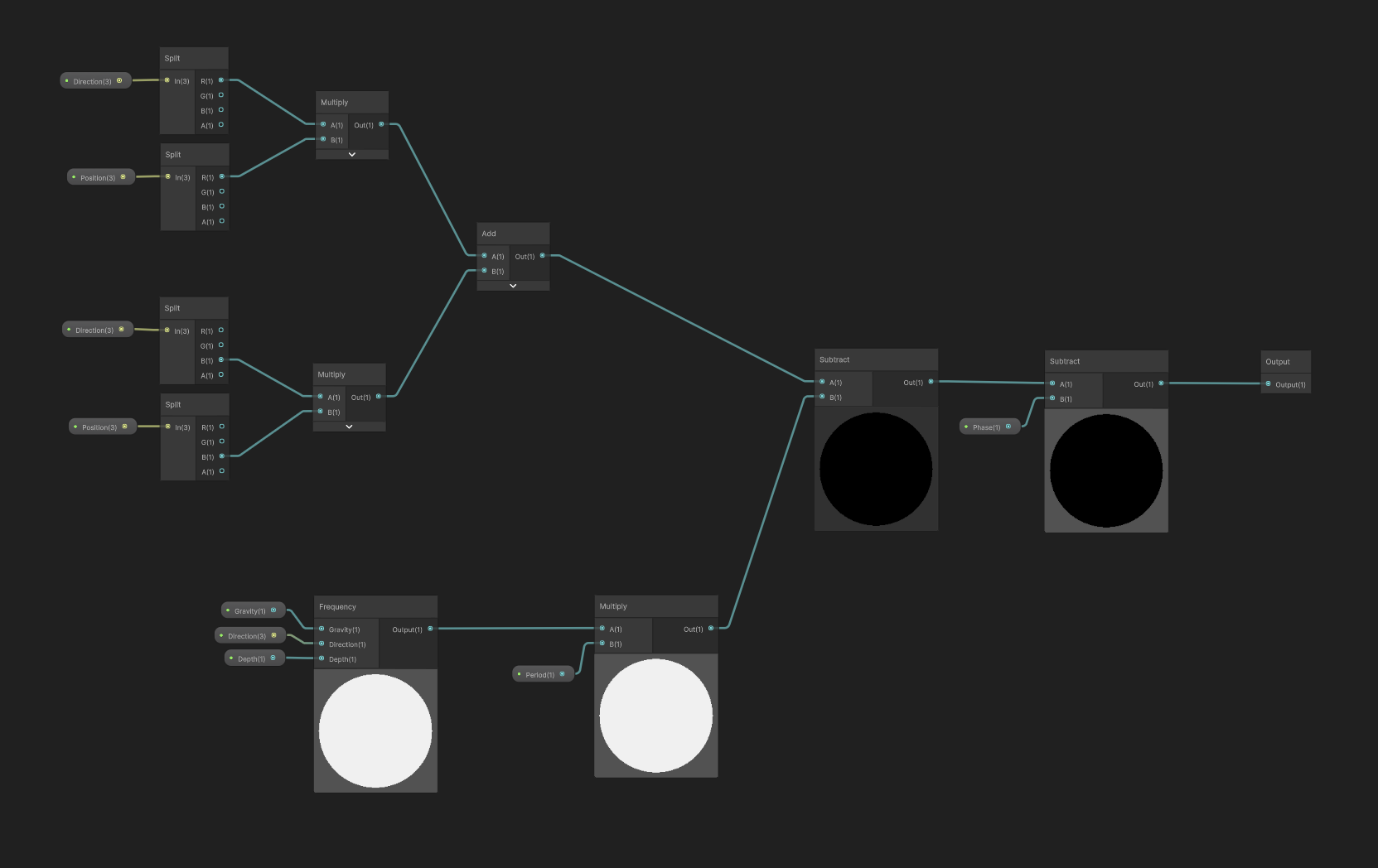
float theta = Theta(pos, direction, amplitude, phase, period, gravity, depth);
// X
float a = direction.x / direction.magnitude;
float b = amplitude / HyperbolicTangent(direction.magnitude * depth);
float x = -1f * (Mathf.Sin(theta) * a * b);
// Y
float y = Mathf.Cos(theta) * amplitude;
// Z
float j = direction.z / direction.magnitude;
float z = -1f * (Mathf.Sin(theta) * j * b);
return new Vector3(x, y, z);
}
float Theta(Vector3 pos, Vector3 direction, float amplitude, float phase, float offset, float gravity, float depth)
{
float frequency = Frequency(direction.x, gravity, depth);
float a = (direction.x * pos.x) + (direction.z * pos.z);
float b = frequency * offset;
return (a - b) - phase;
}
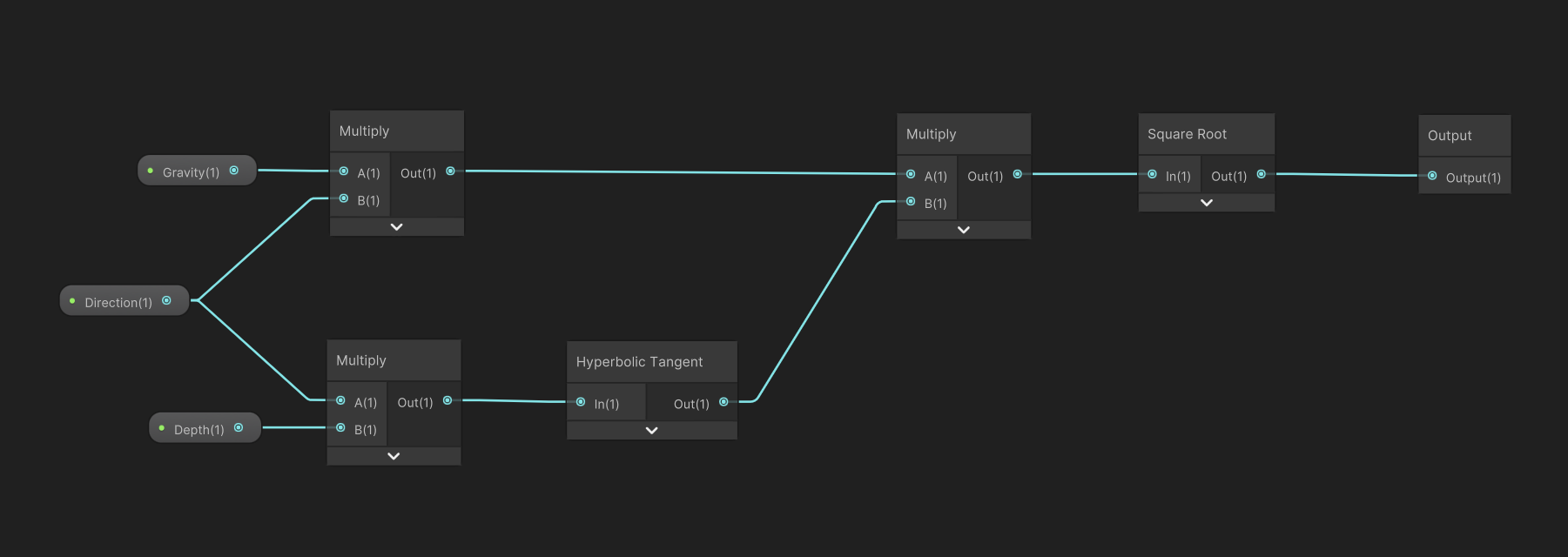
float Frequency(float length, float gravity, float depth)
{
float a = gravity * length;
float b = HyperbolicTangent(length * depth);
return Mathf.Sqrt(a * b);
}
float HyperbolicTangent(double a)
{
return (float)System.Math.Tanh(a);
}